
PID controller
What is a PID Controller ?
Now we come to one of the most important topics in the study of control engineering: PID controller.
So What it is Exactly ?
The term PID stands for proportional integral derivative and it is one kind of device used to control different process variables like pressure, flow, temperature, and speed in industrial applications. In this controller, a control loop feedback device is used to regulate all the process variables.
This type of control is used to drive a system in the direction of an objective location otherwise level. It is almost everywhere for temperature control and used in scientific processes, automation & myriad chemical. In this controller, closed-loop feedback is used to maintain the real output from a method like close to the objective otherwise output at the fixe point if possible. In this article, the PID controller design with control modes used in them like P, I & D are discussed.
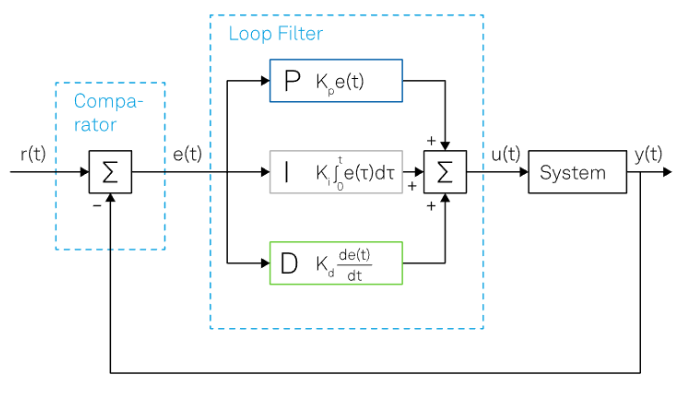
PID Controller Block Diagram
A closed-loop system like a PID controller includes a feedback control system. This system evaluates the feedback variable using a fixed point to generate an error signal. Based on that, it alters the system output. This procedure will continue till the error reaches Zero otherwise the value of the feedback variable becomes equivalent to a fixed point.
This controller provides good results as compared with the ON/OFF type controller. In the ON/OFF type controller, simply two conditions are obtainable to manage the system. Once the process value is lower than the fixed point, then it will turn ON. Similarly, it will turn OFF once the value is higher than a fixed value. The output is not stable in this kind of controller and it will swing frequently in the region of the fixed point. However, this controller is more steady & accurate as compared to the ON/OFF type controller.
-
r(t) - System setpoint
-
e(t) - Error signal
-
u(t) - Control signal
-
y(t) - Sytem output
Mathematical Calculations of PID Controller
The proper mathematical relation including all the functionalities of its sub-controllers is:

where,
-
u(t) : The control output at time t.
-
e(t) : The error at time t is defined as ** e(t) = r(t) – y(t) **
-
kp : Proportional gain.
-
ki : Integral gain.
-
kd : Derivative gain.
What Are Proportional, Integral, And Derivatives in PID?
Proportional -The term “P” is for a proportional system. If the error ** e(t) = r(t) – y(t) ** is large and positive, the controller’s command to the control variable will be larger consequently and small in case of a minor error. At a specific duration of time, if there is no error in the system, no corrective action will be taken by the proportional controller part. It is also known as ‘First Order’ because it responds to output only once every time period. In other words, proportional action is independent of time.
Integral -The term “I” is associated with integration. It sums the past values of ** e(t) = r(t) – y(t) ** to get the final I value for the controller system. If there is still a residual error after taking the action of the proportional controller system, the integral control takes action by eliminating the accumulated error from past calculations. In another way, the proportional error diminishes after its action, but the integral system compensates for this effect. It is also known as ‘Second order’ because it acts as a memory of the previous changes in the system or dynamics of the system. In other words, integral action has a memory of past process behavior.
Derivative -The term “D” estimates the future error value ** e(t) = r(t) – y(t) ** by analyzing the current deviations. It is related to the rate of change, if the rate of change is larger, then the rate of action will be rapid, and if the change rate is slow, then the corrective action will be slow. Derivative action enhances control performance around setpoint conditions because it acts as the rate of change of the controller output.
Additional References
Fulfill your quench of knowledge with these amazing reads and videos.
- How to tune PID? (article)